软件安装
下载arduino:
sudo apt install arduino
安装rosserial:
sudo apt install ros-melodic-rosserial ros-melodic-rosserial-server ros-melodic-rosserial-arduino ros-melodic-rosserial-python
为了在Arduino中使用它,需要创建一个用于Arduino的rosserial库:
# old:
# cd ~/Arduino/libraries/
cd ~/sketchbook/libraries
rm -rf ros_lib
rosrun rosserial_arduino make_libraries.py .
arduino
subscriber
arduino接受发布在/led_out的数据,控制pin8引脚的电平开关。
硬件
使用的是arduino pro mini 328p版,发现168p版本存储不够。
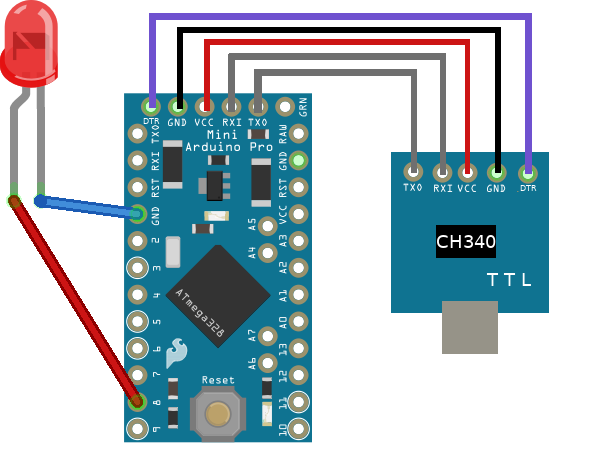
DTR用于在上传程序时自动RESET板子,否则需要在上传时手动按一下板子上的RESET按键(时机需要自己把握,比较麻烦)。
代码
#include <ros.h>
#include <std_msgs/Byte.h>
void process(const std_msgs::Byte& led_msg){
digitalWrite(8, led_msg.data);
}
ros::NodeHandle nh;
ros::Subscriber<std_msgs::Byte> sub("led_out", process);
void setup() {
// put your setup code here, to run once:
pinMode(8, OUTPUT);
nh.initNode();
nh.subscribe(sub);
}
void loop() {
// put your main code here, to run repeatedly:
nh.spinOnce();
}
arduino上传程序需要/dev/ttyUSB0的权限。
sudo chmod 777 /dev/ttyUSB0
测试
- 启动ros服务
- 启动rosserial服务
- 查看msg数据
- 发送数据
roscore
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0
rostopic echo /led_out
rostopic pub -1 /led_out std_msgs/Byte 1
发送数字1打开小灯(非1即可),发送数字0关闭。
rosserial_python可通过_port指定设备,通过_baud指定波特率(书中是115200并不能成功连接,改为57600后成功,后改为不设置可以自动设置)。 rostopic pub[data...] `rostopic pub`中-1是执行一次。
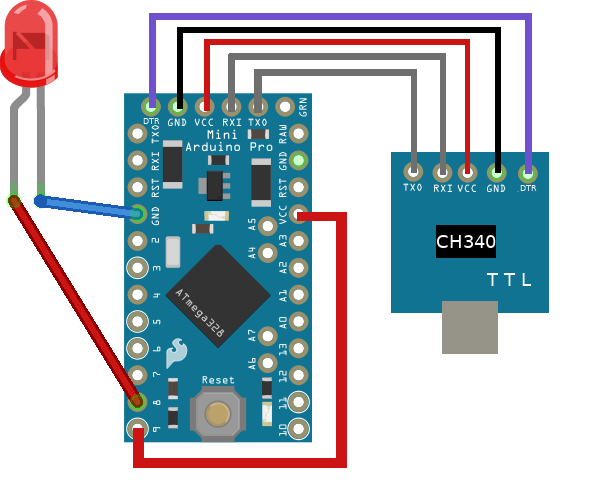
publisher
用引线将VCC/GND输入pin9,将pin8输出电平值。
arduino发送pin9引脚的值到/led_out。
硬件
代码
#include <ros.h>
#include <std_msgs/Byte.h>
ros::NodeHandle nh;
std_msgs::Byte led_msg;
ros::Publisher pub("led_out", &led_msg);
void setup() {
// put your setup code here, to run once:
nh.initNode();
nh.advertise(pub);
pinMode(8, OUTPUT);
pinMode(9, INPUT);
}
void loop() {
// put your main code here, to run repeatedly:
uint8_t reading = 0;
static uint32_t pre_time;
reading = digitalRead(9);
digitalWrite(8, reading);
if(millis() - pre_time >= 50){
led_msg.data = reading;
pub.publish(&led_msg);
pre_time = millis();
}
nh.spinOnce();
}
测试
- 启动ros服务
- 启动rosserial服务
- 查看msg数据
- 输入电平到输入引脚
roscore
rosrun rosserial_python serial_node.py _port:=/dev/ttyUSB0
rostopic echo /led_out
将引脚VCC/GND引到pin9。
在pc,rostopic echo命令的终端可以看到来自板子的/led_out数据。